Motor de passo unipolar
Esta página mostra dois exemplos de como ativar um motor de passo unipolar. Esse tipo de motor pode ser encontrado em unidades antigas de disquetes e são fáceis de controlar. O exemplar que utilizamos tem cinco conectores, sendo um a alimentação (VCC) e os demais, usados para acionar o motor mediante o envio de sinais sincronizados.
O primeiro código é um exemplo de como fazer o motor girar em um sentido. É destinado aos praticantes que não têm nenhum conhecimento de como controlar motores de passo. O segundo exemplo é mais complexo, mas permite que o motor gire a velocidades diferentes, nos dois sentidos, e controlável com um potenciômetro.
Precisamos de um potenciômetro de 10 kohms, que conectamos a uma entrada analógica, e um chip ULN2003A. Este último tem muitos transístores embutidos dentro de um único componente e servem para fornecer correntes elétricas muito maiores do que as que o chip Atmega do Arduino pode oferecer.
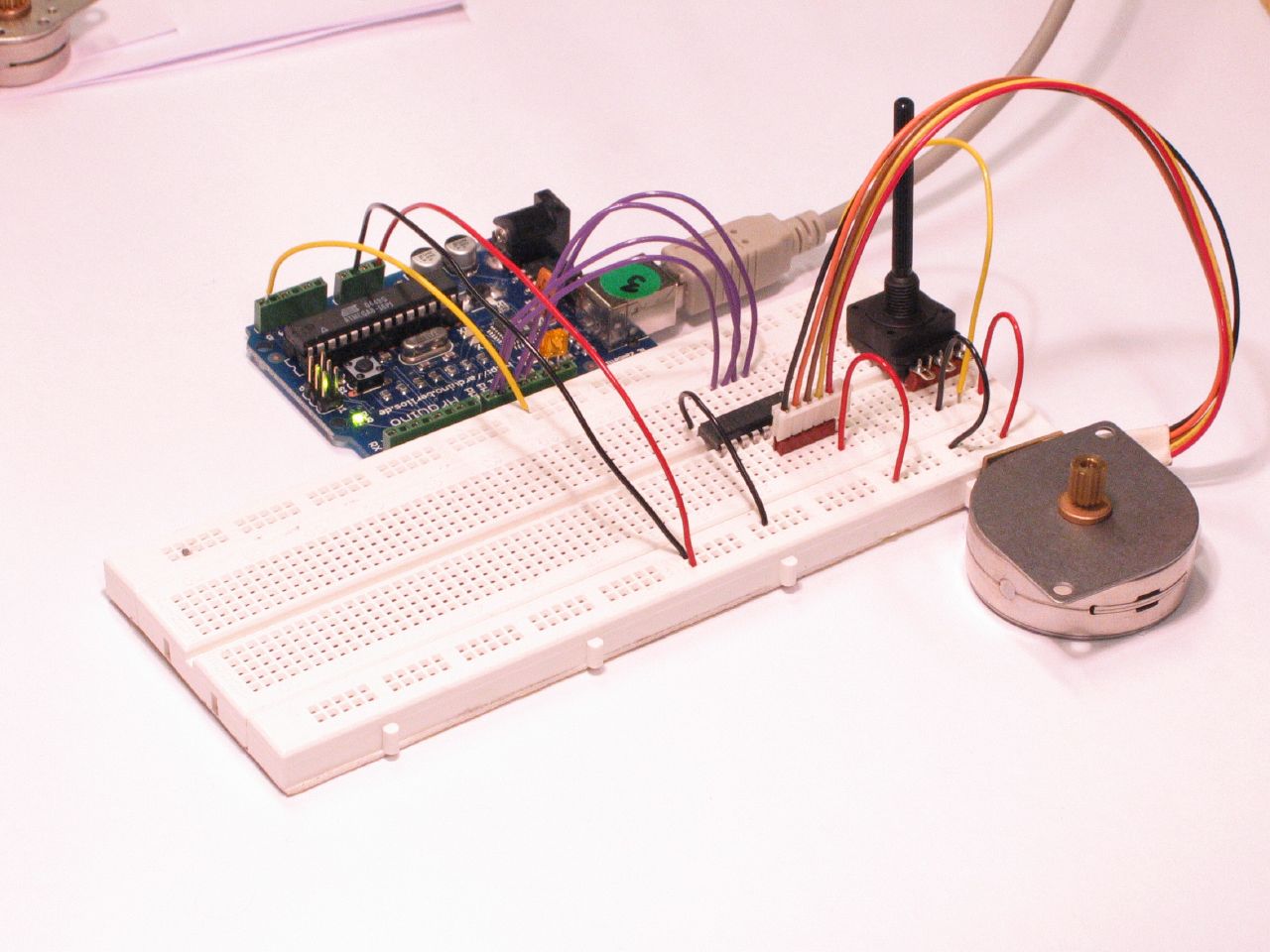
Fotografia de um protoboard com o potenciômetro e o ULN2003A
Exemplo 1: exemplo simples
/* Motor de passo Copal
* --------------------
*
* Programa para acionar um motor de passo proveniente de
* um drive de disquete de 5'25
* De acordo com a documentação encontrada, este motor:
* "[...] motor
* made by Copal Electronics, with 1.8 degrees per step and 96 ohms
* per winding, with center taps brought out to separate leads [...]"
* [https://www.cs.uiowa.edu/~jones/step/example.html]
*
* Trata-se de um motor de passo unipolar com 5 fios:
*
* - vermelho: alimentação, 5V pareceu-me bem
* - laranja e preto: bobina 1
* - marrom e amarelo: bobina 2
*
* (cleft) 2005 DojoDave para o K3
* https://www.0j0.org | http://arduino.berlios.de
*
* @author: David Cuartielles
* @date: 20 Out 2005
*/
int motorPin1 = 8;
int motorPin2 = 9;
int motorPin3 = 10;
int motorPin4 = 11;
int delayTime = 500;
void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}
void loop() {
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(delayTime);
}
Exemplo 2: exemplo avançado
/* Motor de passo unipolar avançado
* --------------------------------
*
* Programa para acionar um motor de passo proveniente de
* um drive de disquete de 5'25
* De acordo com a documentação encontrada, este motor:
* "[...] motor
* made by Copal Electronics, with 1.8 degrees per step and 96 ohms
* per winding, with center taps brought out to separate leads [...]"
* [https://www.cs.uiowa.edu/~jones/step/example.html]
*
* Trata-se de um motor de passo unipolar com 5 fios:
*
* - vermelho: alimentação, 5V pareceu-me bem
* - laranja e preto: bobina 1
* - marrom e amarelo: bobina 2
*
* (cleft) 2005 DojoDave for K3
* https://www.0j0.org | http://arduino.berlios.de
*
* @author: David Cuartielles
* @date: 20 Out 2005
*/
int motorPins[] = {8, 9, 10, 11};
int count = 0;
int count2 = 0;
int delayTime = 500;
int val = 0;
void setup() {
for (count = 0; count < 4; count++) {
pinMode(motorPins[count], OUTPUT);
}
}
void moveForward() {
if ((count2 == 0) || (count2 == 1)) {
count2 = 16;
}
count2>>=1;
for (count = 3; count >= 0; count--) {
digitalWrite(motorPins[count], count2>>count&0x01);
}
delay(delayTime);
}
void moveBackward() {
if ((count2 == 0) || (count2 == 1)) {
count2 = 16;
}
count2>>=1;
for (count = 3; count >= 0; count--) {
digitalWrite(motorPins[3 - count], count2>>count&0x01);
}
delay(delayTime);
}
void loop() {
val = analogRead(0);
if (val > 540) {
// quanto maior o valor no potenciômetro, mais rápido
delayTime = 2048 - 1024 * val / 512 + 1;
moveForward();
} else if (val < 480) {
// quanto menor o valor no potenciômetro, mais devagar
delayTime = 1024 * val / 512 + 1;
moveBackward();
} else {
delayTime = 1024;
}
}